About
CompilerGym is a toolkit for exposing compiler optimization problems for reinforcement learning. It allows AI researchers to experiment with program optimization techniques without requiring any experience in compilers, and provides a framework for compiler developers to expose new optimization problems for AI.
Overview:
Motivation
The optimization decisions that compilers make are critical for the performance and efficiency of compiled software. However, tuning an optimizing compiler is hard. There are many decisions to make, a near infinite number of possible input programs, and most programs respond differently to optimizations. Interest in applying AI to this problem is increasing rapidly, but compilers are complex, always changing, and comprise millions of lines of low-level systems code. Further, most compilers don’t expose the optimization decisions in a discoverable manner, and those that do often don’t provide an accessible platform for experimentation. This creates a high barrier to entry. As a result, progress is slow.
Our Vision
We aim to lower the barrier to entry to compiler AI research by building a playground that allows anyone to experiment with program optimizations, without needing to write a single line of C++. We have four goals:
Build the “ImageNet for compilers”: a high-quality, open-source OpenAI gym environment for experimenting with compiler optimizations using real-world software and datasets and get it into the hands of AI researchers. The environment takes care of the substantial engineering legwork that is required to get started in compiler research.
Improve the fairness and reproducibility of compiler research by allowing direct comparison of different techniques using a common experimental framework.
Allow users to control every single decision that a compiler makes. To begin with, we will focus on exposing high-level optimization decisions for which there are existing hand-tuned heuristics. We will gradually relax this restriction to accommodate every optimization decision, eventually, even introducing new decisions, using the compiler as a platform for arbitrary code manipulation (see Roadmap for details).
Make it easy to deploy research findings to production. Often, there is no clear path for a research prototype to have impact on real-world infrastructure. Using our environment we can build out the tools so that the best of the research results can be directly applied to improving production use cases, by integrating with existing build infrastructure.
Roadmap
v0.1.0 software release.
Release the LLVM codesize problem set for one-line install on Linux / macOS.
Provide baseline agent implementations and results on benchmarks.
v0.1.x releases.
Add support for optimizing LLVM for performance and compiled codesize.
Add support for distributed agent/environments during training.
Add a distributed environment state cache to make training faster.
v1.x.x releases.
Take what we learned from building environments for compilers and generalize it to other systems domains, e.g. OS level optimizations, scheduling problems, etc.
Enabling increasingly-granular control over optimization decisions
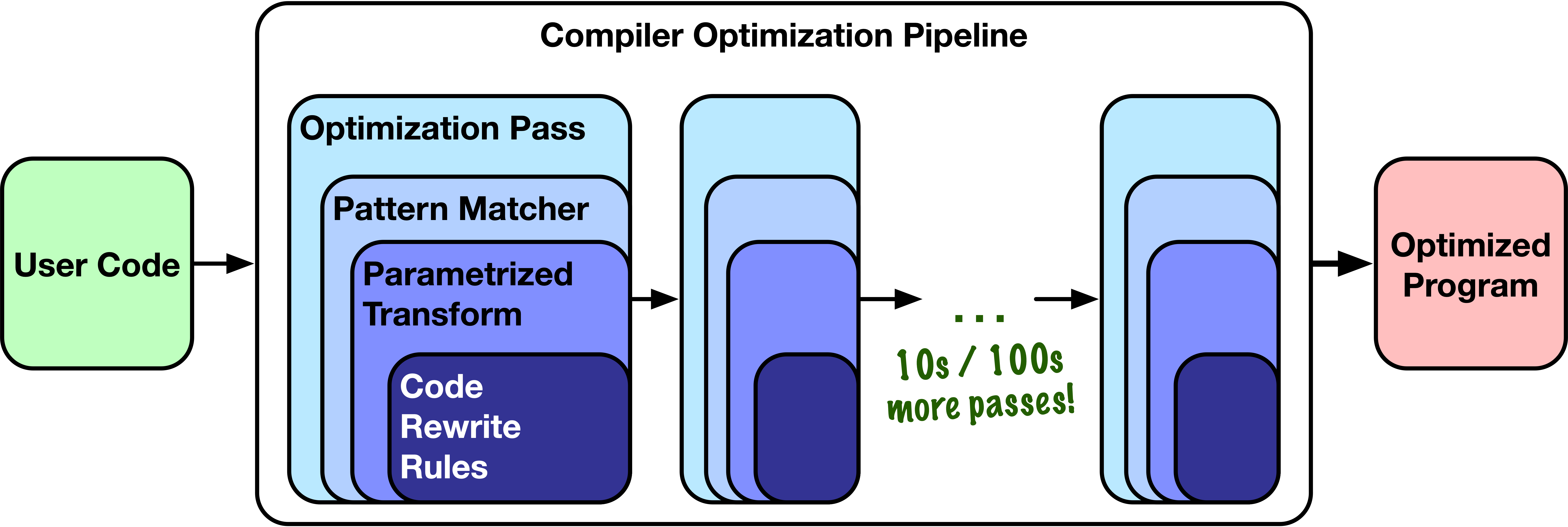
Most compilers optimize programs by running code through a fixed
pipeline of optimization passes. An optimization pass is a set of code
rewrite rules, for example a LoopUnroll pass duplicates the
body so that fewer loop iterations are required. Many of these rules
are parameterized, e.g., loop unrolling can be applied with different
factors (how many times to unroll a loop). A pattern matcher
determines where the transform should be applied, e.g. estimating
which loops would benefit from unrolling.
Our plan is to extend the granularity of control over the compiler that we expose in four phases:
Phase |
Granularity |
Example decision |
|---|---|---|
1 |
Optimization Pass |
Which optimization pass should I run next? |
2 |
Pattern Matcher |
Which of the 10 loops in the program sould I unroll? |
3 |
Parametrized Transform |
How many times should I unroll this loop? |
4 |
Code Rewrite Rule |
What instruction should I replace this code with to make it better? |
Feature Stability
CompilerGym is in an early stage of development. Our goal is to maintain a stable user-facing API to support developing agents, while achieving a fast pace of development by permitting a volatile implementation for backend features. This table summarizes our stability guarantees by component, starting at the user-facing APIs and working down to the backend service implementations:
Component |
Stability |
|---|---|
Core Python API.
e.g.
env.step(), env.reset(). |
✅ Stable. We provide full compatibility with the OpenAI
gym interface. Should OpenAI change this interface,
we will update and maintain backwards compatability
for a minimum of five releases.
|
Python API Extensions.
e.g.
env.fork(), env.validate(). |
🏗️ Stable with dreprecations. Breaking changes will be
used sparingly where they lead to clear improvements
in usability or performance. Any breaking change will
be preceded by runtime deprecation warnings for a
minimum of two releases.
|
Compiler Service RPC interface.
e.g. CompilerGymService.
|
⚠️ Somewhat stable. Breaking changes are planned, and
will be preceded by deprecation notices in the source
code for a minimum of one release. We recommend
upstreaming new compiler support early to alleviate
maintenance burden.
|
Compiler Service Implementations.
e.g. the LLVM C++ codebase.
|
🛑 Not Stable. Breaking changes can happen at any time.
There is no API stability guarantees. If you are modifying
a compiler service it is strongly recommended to upstream
your work to ease the maintenance burden.
|